
퍼서비어런스의 정면 모습
(출처: NASA photo journal)
이번에는 나사의 화성탐사로버, 퍼서비어런스의 여러 기능들에 대해 알아보겠습니다.
참고로 퍼서비어런스의 애칭은 퍼시(Percy) 입니다.

퍼시는 대부분 기능들을 선배 큐리오시티에게서 물려받았습니다.
이 이유는 수년간 얻은 경험을 이용하여 더욱 의미있는 데이터 수집하기 위해서이죠.
모든 기능이 큐리오시티보다 훨씬 발전했지만, 여기서는 나사가 작정하고 만든 기능들만 살펴보기로 하겠습니다.

컴퓨터
퍼시는 두 개의 컴퓨터를 갖고 있습니다. 하나는 백업용이죠.
프로세서는 오퍼튜니티보다 10배 정도의 향상이 있었지만, 가정용 컴퓨터에 비해서는 아직까지도 사양이 낮습니다.
이 컴퓨터들은 안정성과 전력 소비량을 낮추기 위한 사양으로 구성되었으며 NASA의 공식 홈페이지에는 다음과 같이 소개하고 있습니다.

여기서 말하는 BAE RAD 750 CPU는 코어가 단 한 개입니다. 해당 코어의 코어클럭은 110 - 200 MHz 정도입니다.
(* 최신 펜티엄이 기본클럭이 4.0GHz, 4,000 MHz 입니다.)
잠깐, 사양이 낮다고 무시하시면 안 됩니다. 이 CPU는 케플러 우주망원경을 비롯한 150대 이상의 우주장비에 사용되었던 제품으로, 여러 우주선들에서 안정성이 입증된 컴퓨터입니다.
이들은 높은 방사능 환경에서 버틸 수 있도록 방사성 경화 처리가 되어 있으며, 영하 55 도에서 영상 125 도 까지 버틸 수 있도록 제작되었습니다.

카메라
퍼시 탐사로버에는 총 23개의 카메라들이 탑재되었습니다. (큐리오시티는 총 17대를 갖고 있죠)
촬영에 쓰일 공학 카메라 9대, 과학 기록을 도와줄 분석 카메라 7대, 이동과 위험 감지를 위해 사용될 카메라 7대 가 있으며 이 카메라들은 모두 각기 다른 기능을 보유하고 있습니다.
나사는 두 건의 실제 카메라 촬영 사진을 공개했는데, 한번 살펴보겠습니다.

15미터 거리에서 광물질 분석이 가능한 Navcam (5120 x 3840 픽셀)

시험관에 담은 암석 샘플 자료를 컬러 현미경 촬영이 가능한 CacheCam
실제 촬영 사진을 첨부하진 못했지만, 저희에게 가장 중요한 카메라는 Mastcam-Z 라는 카메라입니다.
인간의 눈이 되어줄 Mastcam-Z 는 고화질 비디오, 파노라마 컬러, 3D 이미지를 촬영할 수 있습니다. (1600 * 1200 픽셀)

서스펜션과 바퀴
고급 산악 자전거 프레임에 사용되는 티타늄 튜브로 다리를 만들었고 티타늄 징을 박은 알루미늄 바퀴를 추가했습니다.
큐리오시티가 바퀴가 깨져버린 경험이 있기에 나사는 로버의 최대 속도를 시속 152 미터 (0.152 km/h) 로 제한시켜버렸습니다. 참고로 보통 사람의 보행 속도는 시속 4828 미터니 (4.82 km/h) 걷는것보다 느린 속도로 이동한다고 보시면 됩니다.

로봇 팔과 샘플 수집기
퍼시는 2.1미터의 로봇팔을 이용하여 암석을 수집한 후 샘플을 내부에 저장할 수 있습니다.
로봇팔은 5개의 다관절 기능과 드릴이 포함되어 있어 광물을 수집해 기체 내부에 저장할 수 있는데,
팔 자체에도 고성능 카메라와 움직이는 광물 화학분석기가 있어 생물의 징후를 감지할 수 있습니다.
여기서 나사가 화성에서 미생물화석을 발견하겠다는 집념을 볼 수 있는데, 실제 작동 방식은 아래와 같습니다.

위 이미지의 전체 영상은 하단 출처에서 확인할 수 있습니다.

전력
퍼시는 선배 기체와 다르게 태양전지를 동력원으로 사용하지 않습니다.
전기 생산을 위해 플루토늄을 이용한 원자력 전력 시스템을 이용하고 있죠.
과거 화성 탐사선들은 태양열 패널이 화성의 먼지에 덮여 작동하지 못했던 경우가 많았고,
이에 연구팀은 로버가 화성의 낮과 밤, 겨울철 등의 일교차를 견더낼 수 있도록 방사성 전력 시스템을 채용했습니다.

통신 시스템
왼쪽부터 초고주파 안테나, X-밴드 고효율 안테나, X-밴드 저효율 안테나입니다.
일반적으로 이렇게 먼 거리에 위치한 기기들은 초고주파(UHF, 400MHz) 이용해 궤도 위성과 연결, 지구와 통신합니다.

잠시 화성 탐사 로버가 지구와 통신하는 방법에 대해 설명하자면, 로버는 대략 3가지 통신 선택을 할 수 있습니다.
1. 오디세이와 같은 궤도 인공위성에 초고주파로 데이터 전송
2. 그 외 화성 주위의 탐사선에 X-밴드 고효율 안테나로 데이터 전송
3. 지구에 직접 X-밴드 저효율 안테나로 데이터 전송
이 통신 부분은 퍼시가 큐리오시티에 비해 크게 발전하진 않았는데,
이 이유는 공유기 역할을 하는 화성 인공위성들을 업그레이드 할 수 없었기 때문입니다.
이 외에 여러 기능들이 업데이트 되었는데, 두 가지를 추가하자면 다음과 같습니다.
* 녹음기: 착륙시 녹음할 마이크 1개, 암석 연구에 쓰일 마이크 1개 가 있습니다.
* 몸체: 큐리오시티의 몸체 디자인을 유지하면서 강도를 올렸습니다. (이로 인해 전작보다 900 kg 에서 1,025 kg으로 무게가 증가하였습니다.)
추가적으로, 퍼시는 비장의 무기를 갖고 있습니다.
대기가 거의 없는 화성에서까지 하늘로 떠오르겠다는 나사의 마음을 담은 화성드론, 인지뉴어티(Ingenuity, 독창성) 입니다.

인지뉴어티는 특수제작된 4개의 탄소 섬유 날개로 만들어진 프로펠러를 갖고 있으며,
2개의 로터가 초당 2,400 rpm 으로 회전해 일반 헬리콥터보다 5배 가량 빠른 회전률을 보여줍니다.

하지만 이런 강력한 힘을 화성이란 환경에서 발휘하려다보니,
인지뉴어티는 오래 비행할 수가 없습니다. (드론의 무게는 1.8kg)
비행시간은 최대 90초, 최대 300m를 날아갈 수 있으며, 수직으로는 5m 의 높이까지 날아갈 수 있습니다.
그에 반해 통신 범위는 1 km 까지 작동하여, 혹시 모를 불상사가 발생해도 통신 모듈이 작동한다면 로버가 가서 확인할 수 있습니다.


나사의 인저뉴어티 개발팀은 인저뉴어티의 첫 미션은 멀리 날아가는 것이 아닌, 그저 공중에 뜨는 것 자체가 첫 번째 미션이 될 것이라고 언급했습니다.
이후 두 번째 미션은 그 상태로 수직 3m 를 올라간 후, 잠시 공중에서 잠시 대기하다 내려오는 것이 될 것입니다.
만약 이 비행이 안정적으로 마쳐지면 그 이후부터는 50 - 70 미터 정도를 미리 탐사해 로버에게 이미지를 가져다주게 되어 새로운 탐사의 길을 열게 됩니다.
나사가 인저뉴어티를 계획한 이유는 단순히 새로운 항공우주기술의 개발만이 아닙니다.
필요할 때마다 공중에서 항공사진을 찍을 수 있다는 것 자체가 로버의 탐사에 엄청난 도움이 되기 때문입니다.

개발팀의 고충을 잠깐 들어보자면, 미약한 대기 구성에서 드론을 작동시키는 것은 매우 어려웠습니다.
이에 팀은 다양한 환경에서 테스트를 진행했는데, 다음과 같은 환경에서 드론을 작동시키는 실험을 진행했습니다.
1) 영하 90도
2) 긴 통신 지연
3) 미약한 대기
4) 제멋대로 작동하는 자이로와 기울기 센서 (화성 자기장은 지구와 다르게 일정하지 않습니다.)
이 과정에서 드론 스스로가 안전 상태를 유지하는 시스템을 개발하여 추가하였으며,
이후 연구팀은 화성의 대기와 가장 비슷한 지구 표준 대기압의 1% 에서 작동을 성공하였고,
여러 테스트 통과 후 탐사로버와 결합하였습니다.

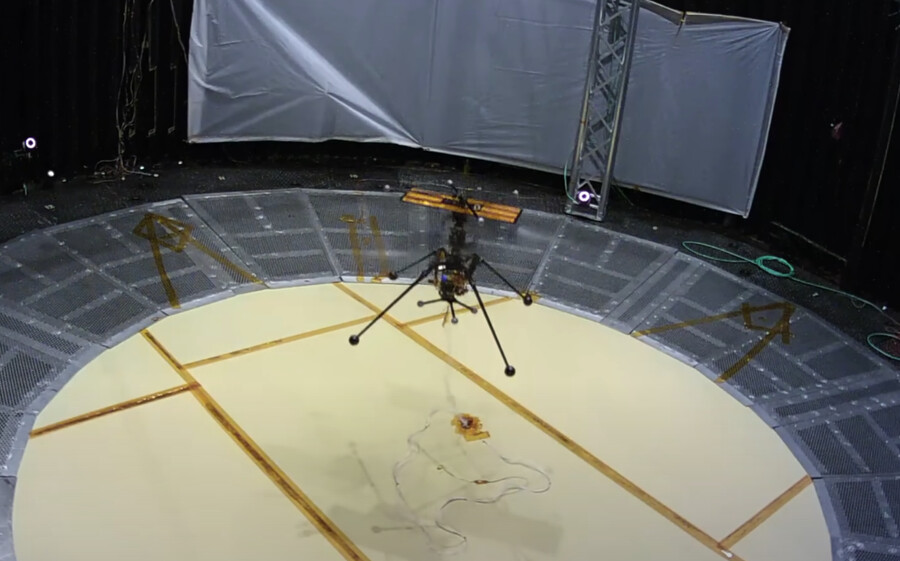
진공 환경에서의 테스트
테스트 영상에선 2500 rpm 까지는 날지 못하다가 2600 rpm에 도달하자 비행을 시작했습니다.


마지막 테스트 이후 퍼서비어런스의 중심부에 드론을 장착하는 모습
본체에 접근할 때는 모든 인원이 방진복을 착용합니다.


두 친구가 탑승한 탐사선은 내년 2월 18일에 화성에 도착하는 것을 목표로 지금도 날아가고 있습니다.
나사는 2026년에 퍼서비어런스 로버가 수집한 표본을 수거를 위해 로버와 착륙선, 지구 귀환 궤도선을 2대의 참사선으로 나누어 화성에 보낼 계획입니다.
다음 시간엔 퍼서비어런스보다 빨리 발사된 중국 화성 탐사선, 톈옌 1호에 대해서 알아보도록 하겠습니다.
하트를 눌러 지속적인 관심과 호응을 보여주시면 글을 쓰는데 큰 도움이 될 것 같습니다.
추가적으로 화성탐사 시리즈는 3편으로 마무리하고, 다른 시리즈를 적어볼까 생각중이니
아래 대분야 중 투표를 해주시거나, 달리 원하는 것이 있으면 댓글을 남겨주면 감사하겠습니다.
1) 로봇(하드웨어) + 인공지능(소프트웨어)
2) 인공지능(소프트웨어) + 의료(소프트웨어)
3) 의료(소프트웨어) + 우주공학(하드웨어)
4) 우주공학(하드웨어) + 로봇(하드웨어)
이 외에도 댓글로 보고싶은 분야가 있다면 댓글로 남겨주면 확인하겠습니다.
참고자료 출처)
- NASA Mars 2020 Rover Sample Collection Animation / NASA (탐사로버 작동 시뮬레이션 영상)
<국문 자료>
- 미국, 화성 탐사선 퍼서비어런스 발사 / 코리안 포스트
- NASA, 내년 2월 화성서 활약할 자율 드론 공개 / 로봇신문
- Mars2020 로버의 새 이름 '퍼서비어런스(Perseverance)'/ 일레이나의 우주 실험실 네이버 블로그
<NASA 공식 영문 자료>
- PIA23764: Perseverance on Mars
- 2020 MISSION PERSEVERANCE ROVER / NASA Science
- NASA Announces Mars 2020 Rover Payload to Explore the Red Planet as Never Before / NASA
- 6 Things to Know About NASA's Ingenuity Mars Helicopter
<영문 유튜브>
- Perseverance Mars Rover Mission Engineering & Science Briefing / NASA
- The first ever Mars helicopter is INGENIOUS / CNET
- Mars Helicopter Attached to Perseverance Rover for July Launch / AmericaSpace
<영문 위키피디아>
'Space > Mars' 카테고리의 다른 글
| 화성탐사 3편) 중국과 미국의 우주경쟁 - 중국톈원 1호 (0) | 2020.08.12 |
|---|---|
| 화성탐사 1편) NASA 화성탐사로버는 화성에 어떻게 착륙하는가? (0) | 2020.08.12 |

